Motivation#
In my last semester of undergrad, I enrolled in MEEN 408/612: Robotic Manipulators with Dr. Dharba. It was a challenging but fascinating course, and a big reason why I decided to pursue robotics as a career.
Part of the class focused on different control strategies for manipulator arms. Since there were no lab sessions, I wanted to take what I learned and apply it to real hardware.
Open Source Robot Arm#
The most cost-effective way to get an arm was to build one myself. I found a small group called Annin Robotics that sold pre-designed kits. These kits included machined parts and a bill of materials for sourcing the rest from Amazon or McMaster-Carr.
Design Lessons#
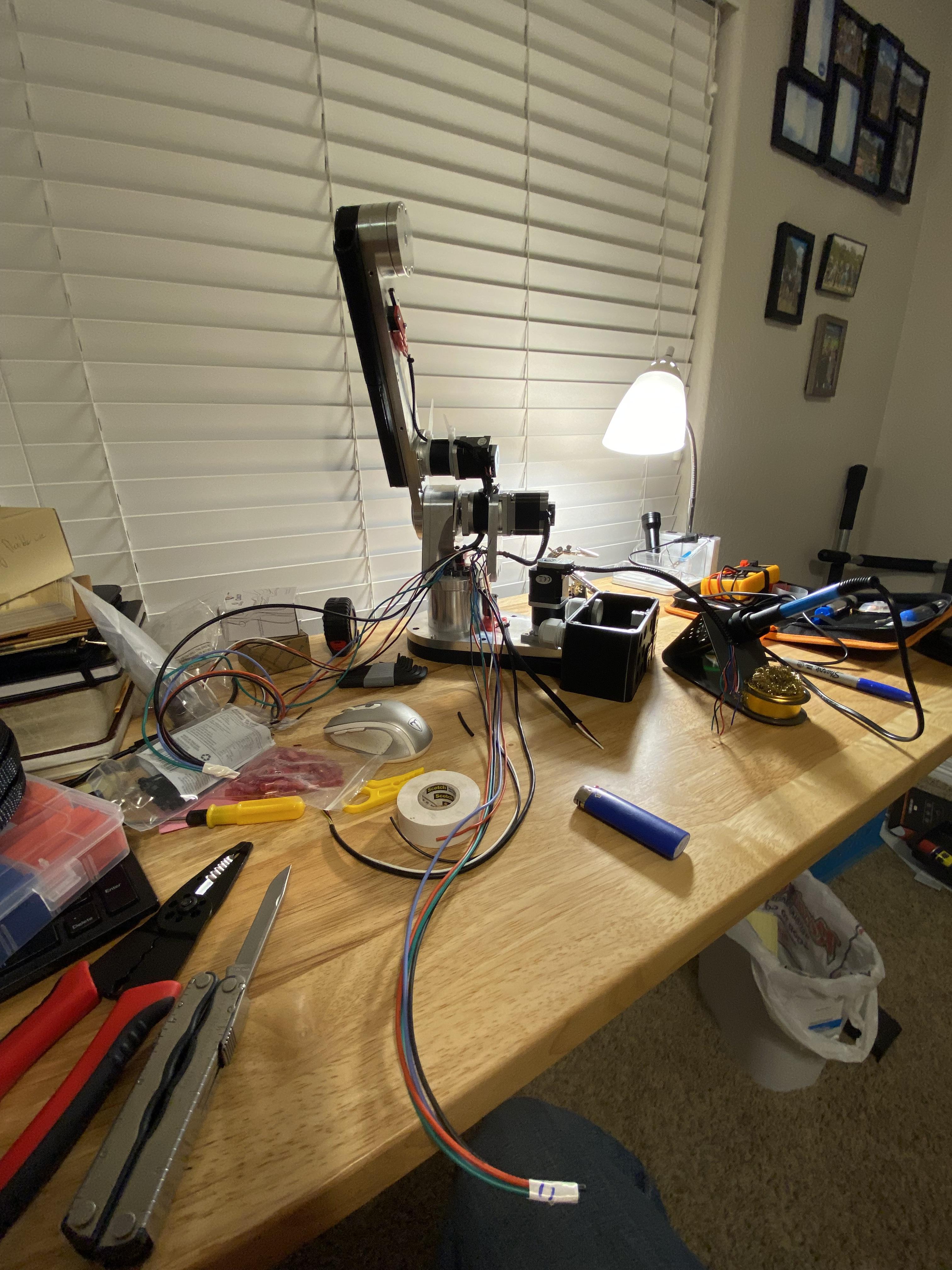
The parts arrived, and I started assembly around the same time we were designing the RoboBall pendulum. As you can imagine, working with Dr. Ambrose on a custom robot is wildly different from assembling a cheap kit. Here are a few lessons I learned while building this arm alongside RoboBall:
- Standardize your fasteners – This kit used multiple bolt heads, set screws, and thread types. Keeping track of them was a pain compared to RoboBall, which only used 4-40s and 10-32s.
- Use standard components wherever possible – For some reason, all the screws were metric, which made it harder to find spares locally.
- Working in an apartment is very limiting – Building an arm requires a surprising amount of space and tools. My bedroom couldn’t function as both a workshop and a place to sleep.
- Design with maintenance in mind – The kit called for many components to be soldered directly together. Adding connectors might have increased bulk but would’ve saved a lot of headaches during repairs.
- Keep software modular and familiar – The included control software used a custom serial protocol, with all the low-level logic lumped into one massive
forloop. It was nearly impossible to read or debug.
Calibration Video#
I eventually finished assembling the arm according to the kit instructions, but didn’t have time to go further as the RoboBall project was ramping up.
Update — October 2025#
I’ve since finished grad school and learned a lot more about robot programming. Once I’m settled into a new job, I plan to rewrite the control software in ROS 2 and possibly implement some controllers using the pydrake library.